
I am a PhD candidate at the 3D Understanding Lab at TUM advised by Prof. Angela Dai, working on 3D scene understanding and generation through multimodal data such as RGB(D), laser scans, and natural language.
I’m a co-author and maintainer of the ScanNet++ indoor scene dataset and benchmarks.
Outside of work, I like to cook, hike, read and play with the neighborhood cats.
I expect to graduate in early 2027 and am actively looking for internship and full-time opportunities in 3D understanding and generation.
Masters thesis / GR / IDP Supervision
Please email or drop by at 2.7.61 TUM CIT if you’re interested in a thesis/GR/IDP. Topics are usually related to semantic understanding and 3D generation on ScanNet++. For examples, see our group’s publications.
Selected Publications

ScanNet++: A High-Fidelity Dataset of 3D Indoor Scenes
ICCV 2023 Oral
1000+ high-resolution indoor scenes with 3D laser scans, panoramic images, 33MP DSLR sequences and iPhone RGBD streams. All registered together, with fine-grained semantic and instance annotations. Includes public semantic and novel view synthesis benchmarks.
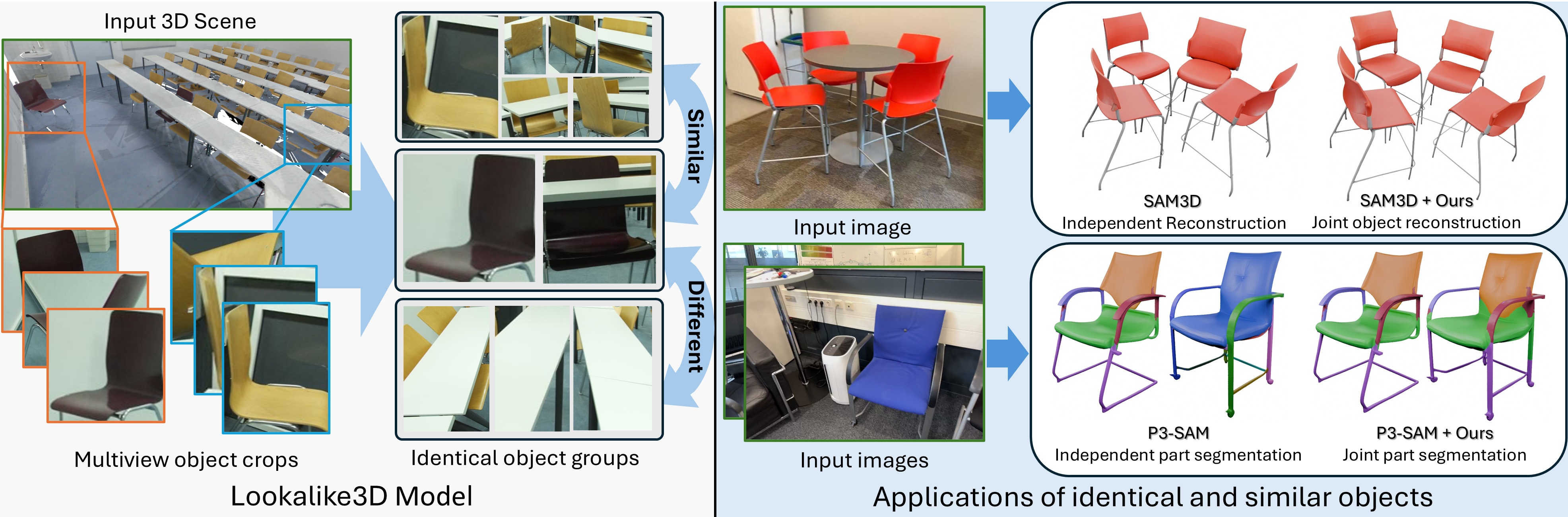
Lookalike3D: Seeing Double in 3D
arXiv 2026
Joint 3D object reconstruction and part co-segmentation of identical and near-identical objects using a multiview image transformer. Introduces the 3DTwins dataset with 76k manually annotated object pairs from ScanNet++, achieving 104% IoU improvement over baselines.

ExCap3D: Expressive 3D Scene Understanding via Object Captioning with Varying Detail
ICCV 2025
Fine-grained object and part-level dense captioning of 3D scenes with Cider score improvement of 17% and 124% over baselines, using semantic and textual consistency losses, Large-scale dataset with 190k object and part-level captions of 34k 3D objects in the ScanNet++ dataset.

Sceneformer: Indoor Scene Generation with Transformers
3DV 2021
Indoor 3D scene generation as sequence of object tokens using Transformers. Generates object location, semantic class, size, rotation and relevant properties by training on the SUNCG dataset. State-of-the-art scene generation validated by a user study and inference speed.
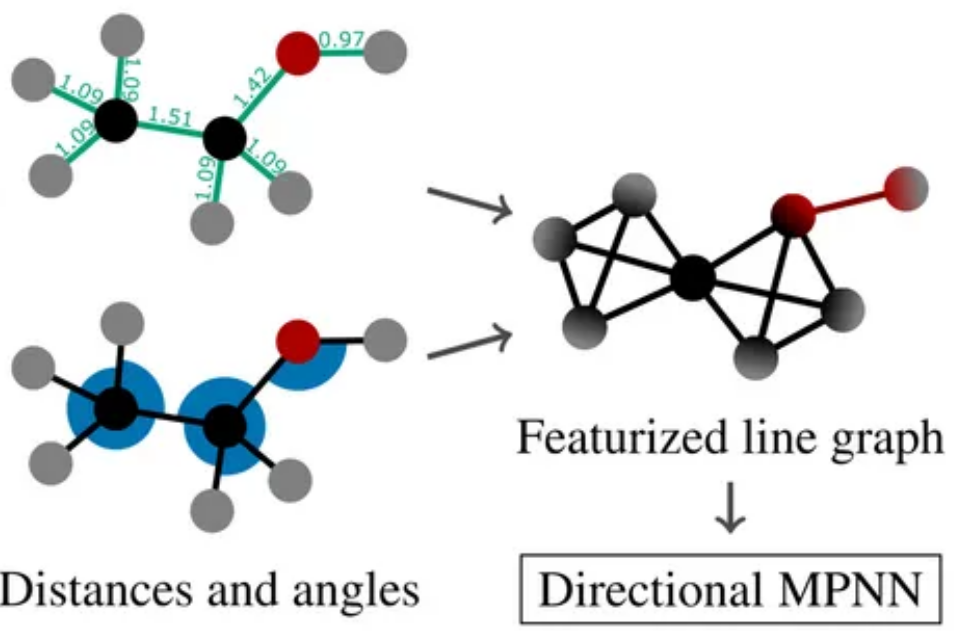
Directional Message Passing on Molecular Graphs via Synthetic Coordinates
NeurIPS 2021
Molecular property prediction using graph neural networks with synthetic coordinates -- distances and angles, as features edge features. State of the art on ZINC and coordinate-free QM9 by incorporating synthetic coordinates in the SMP and DimeNet++ models
Activities
I co-organized the ScanNet++ Workshop (NVS and semantic understanding tracks) at CVPR 2024, CVPR 2025, and CVPR 2026.
Reviewing
ICCV 2023, ECCV 2024, CVPR 2025, ICCV 2025, BMVC 2026, ECCV 2026
Teaching
Teaching Assistant, Introduction to Deep Learning, TU Munich — Apr 2025–present (1000+ students)
Experience
- MSc. in Robotics, Cognition and Intelligence, TU Munich — thesis on 3D-2D Contrastive Learning
- Research Engineer, Siemens R&D, India
- M.Tech and B.Tech, IIIT Bangalore — Dean’s Merit List
Personal Projects
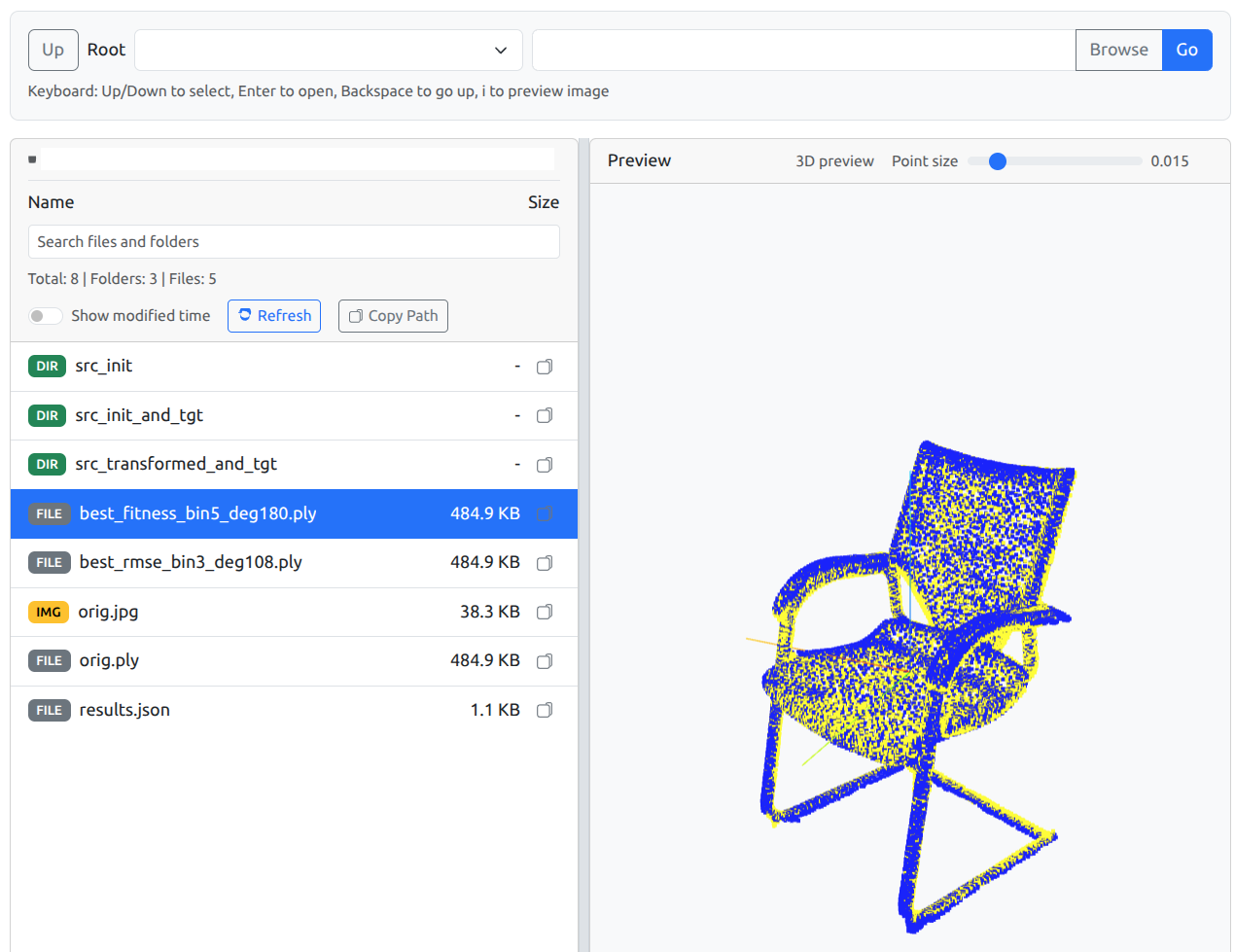
fileman: File Manager for 3D Computer Vision Researchers
A simple web file browser to view images, text files, 3D point clouds, meshes and videos directly in the browser. Supports interactive 3D visualization of .ply mesh and point cloud files, syntax highlighting for text files, and keyboard navigation.

slurman: Web-based Slurm Job Manager
A Flask + Vue.js web application to monitor Slurm jobs in real-time. Features live job status updates, chunked log file viewing, job cancellation, historical job search, and persistent annotations.